2.1. Continuous Optimization¶
-
surrogate.benchmarks.cigar(variable)[source]¶ Cigar test objective function.
Type minimization Range none Global optima \(x_i = 0, \forall i \in \lbrace 1 \ldots N\rbrace\), \(f(\mathbf{x}) = 0\) Function \(f(\mathbf{x}) = x_0^2 + 10^6\sum_{i=1}^N\,x_i^2\)
-
surrogate.benchmarks.plane(variable)[source]¶ Plane test objective function.
Type minimization Range none Global optima \(x_i = 0, \forall i \in \lbrace 1 \ldots N\rbrace\), \(f(\mathbf{x}) = 0\) Function \(f(\mathbf{x}) = x_0\)
-
surrogate.benchmarks.sphere(variable)[source]¶ Sphere test objective function.
Type minimization Range none Global optima \(x_i = 0, \forall i \in \lbrace 1 \ldots N\rbrace\), \(f(\mathbf{x}) = 0\) Function \(f(\mathbf{x}) = \sum_{i=1}^Nx_i^2\)
-
surrogate.benchmarks.rand(variable)[source]¶ Random test objective function.
Type minimization or maximization Range none Global optima none Function \(f(\mathbf{x}) = \text{\texttt{random}}(0,1)\)
-
surrogate.benchmarks.ackley(variable)[source]¶ Ackley test objective function.
Type minimization Range \(x_i \in [-15, 30]\) Global optima \(x_i = 0, \forall i \in \lbrace 1 \ldots N\rbrace\), \(f(\mathbf{x}) = 0\) Function \(f(\mathbf{x}) = 20 - 20\exp\left(-0.2\sqrt{\frac{1}{N} \sum_{i=1}^N x_i^2} \right) + e - \exp\left(\frac{1}{N}\sum_{i=1}^N \cos(2\pi x_i) \right)\) (Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
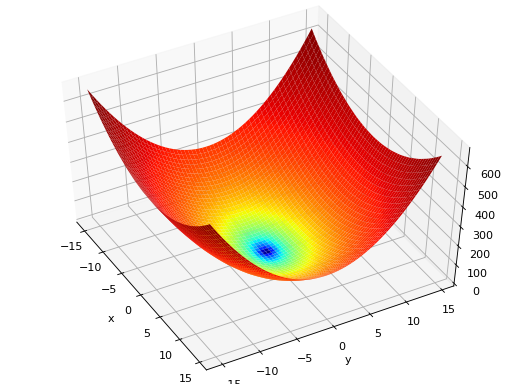
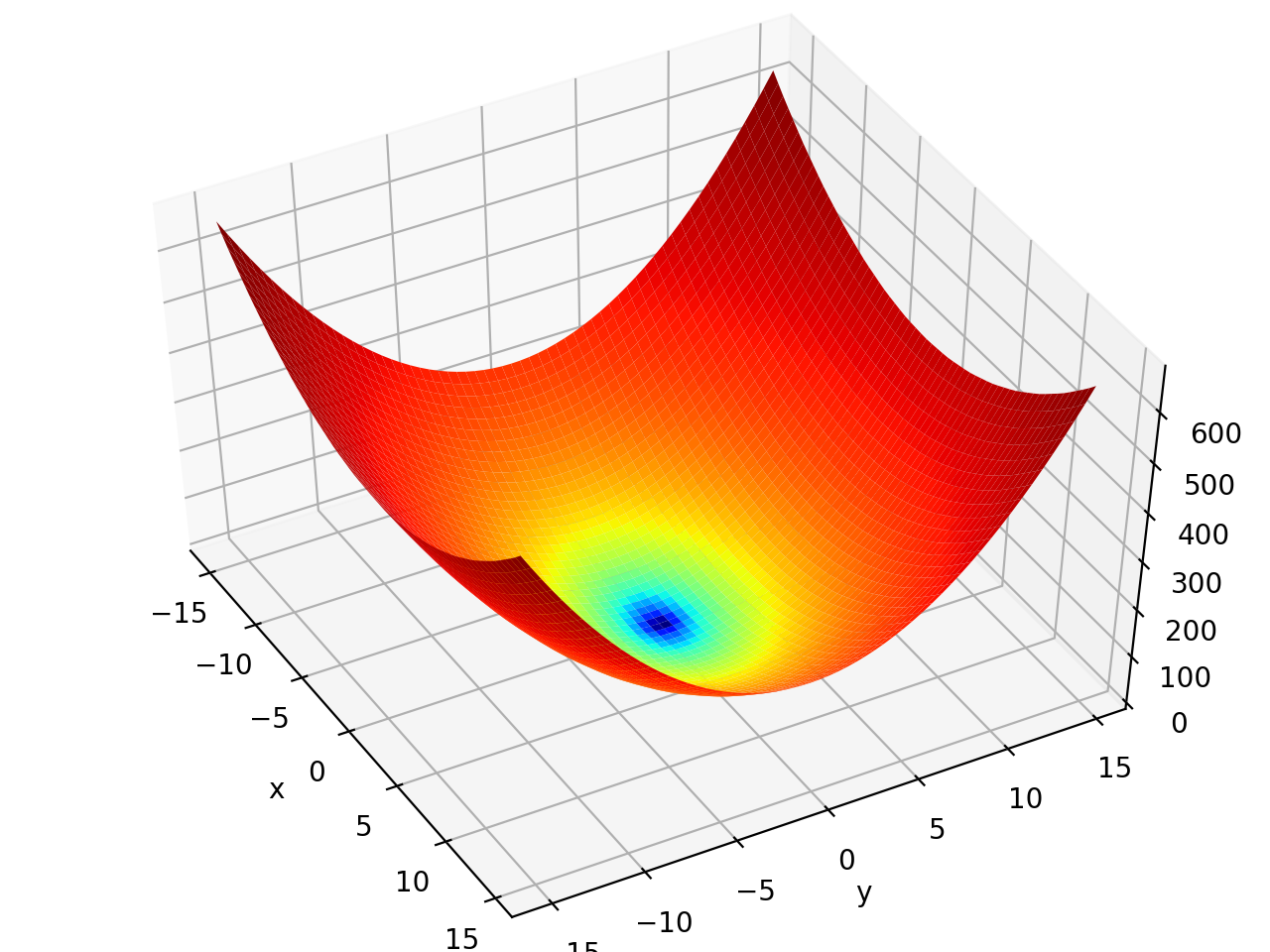
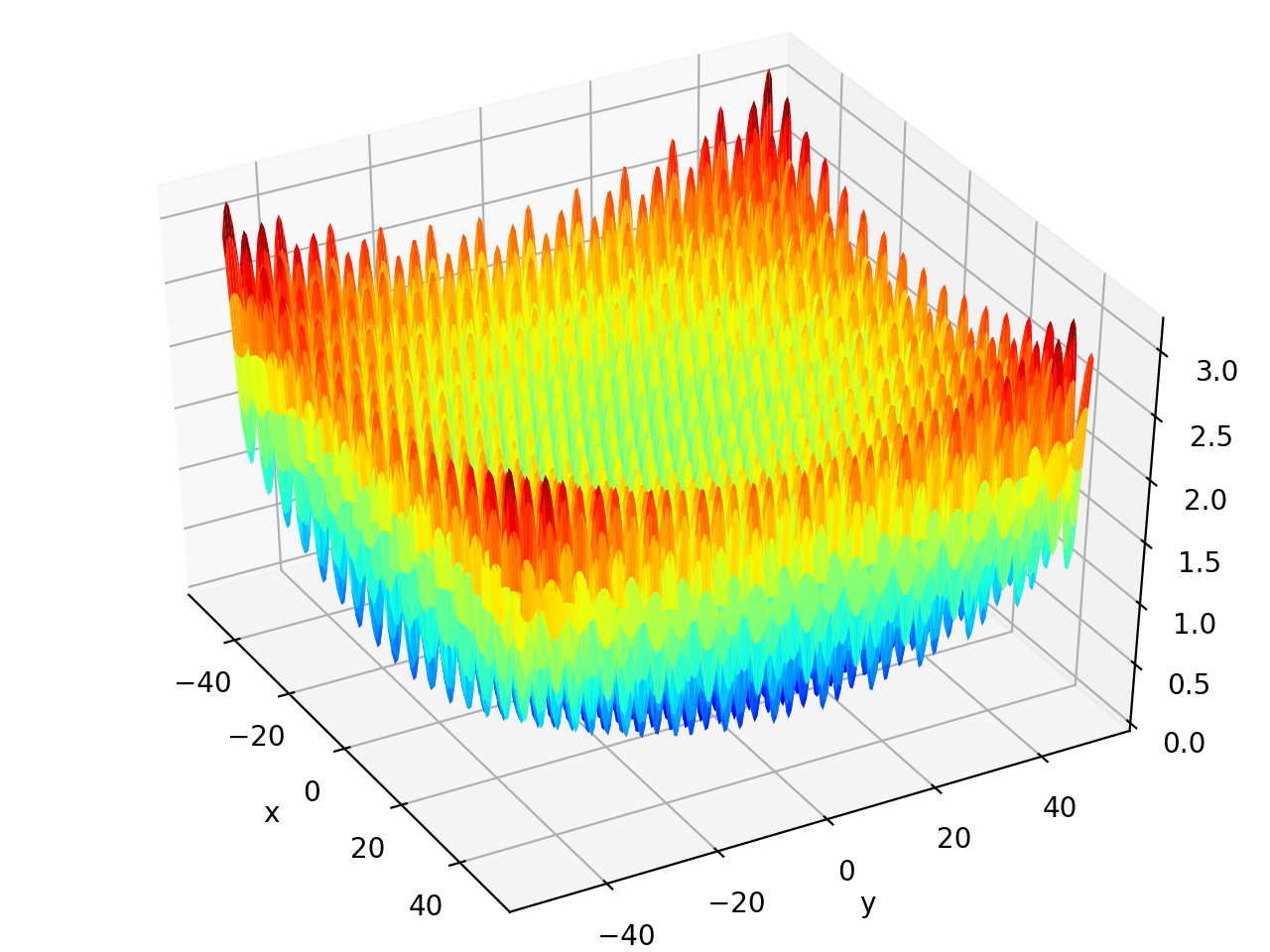
surrogate.benchmarks.bohachevsky(variable)[source]¶ Bohachevsky test objective function.
Type minimization Range \(x_i \in [-100, 100]\) Global optima \(x_i = 0, \forall i \in \lbrace 1 \ldots N\rbrace\), \(f(\mathbf{x}) = 0\) Function \(f(\mathbf{x}) = \sum_{i=1}^{N-1}(x_i^2 + 2x_{i+1}^2 - 0.3\cos(3\pi x_i) - 0.4\cos(4\pi x_{i+1}) + 0.7)\) (Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
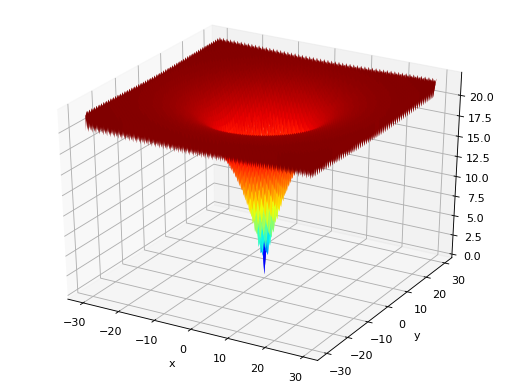
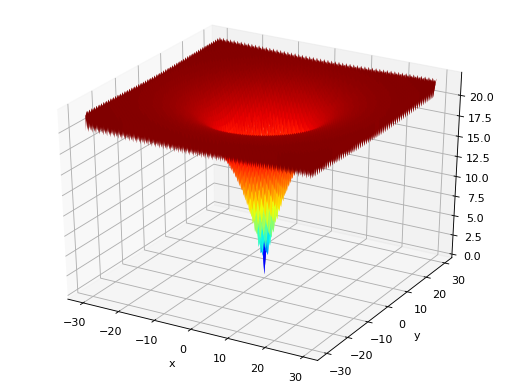
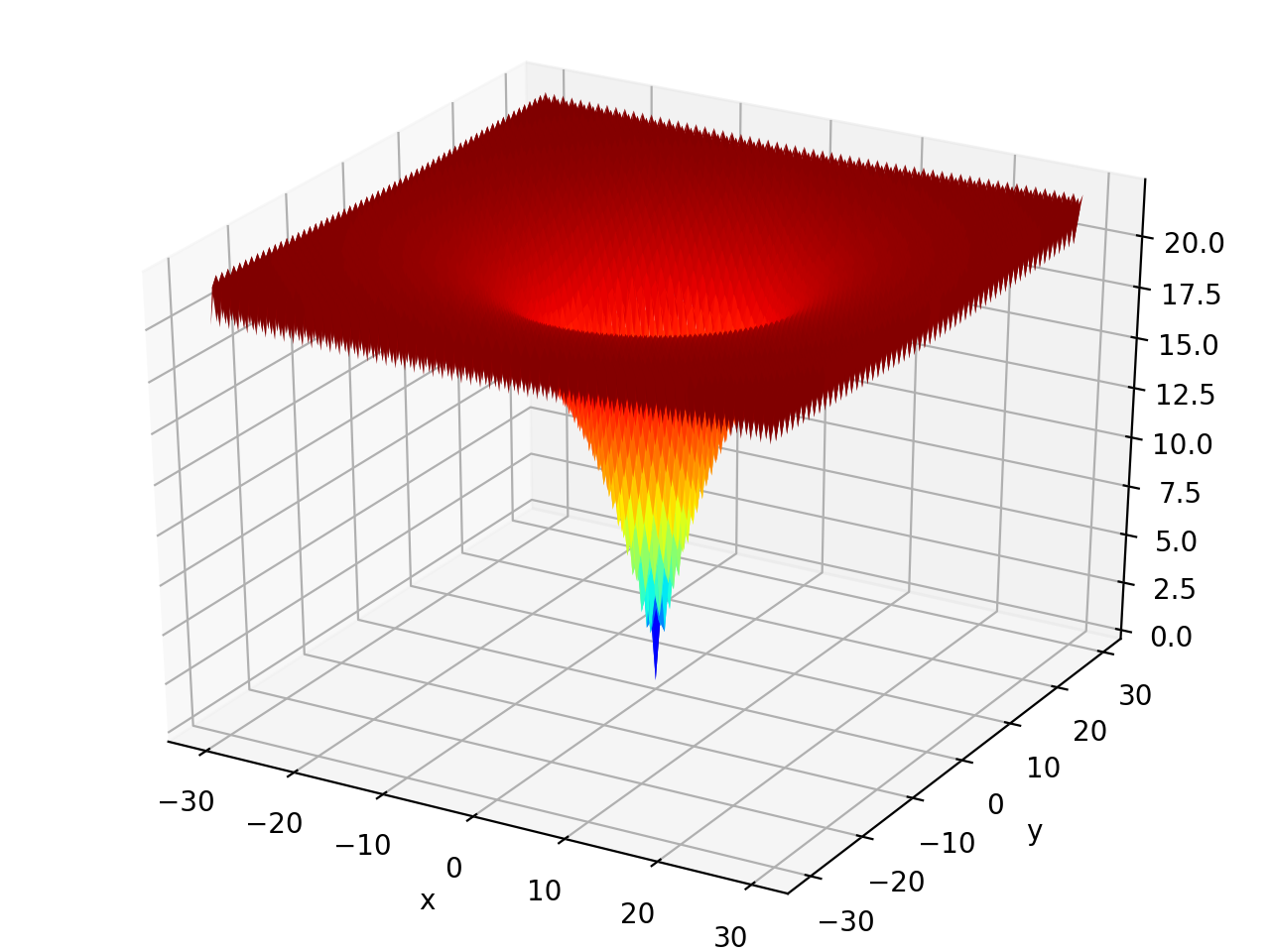
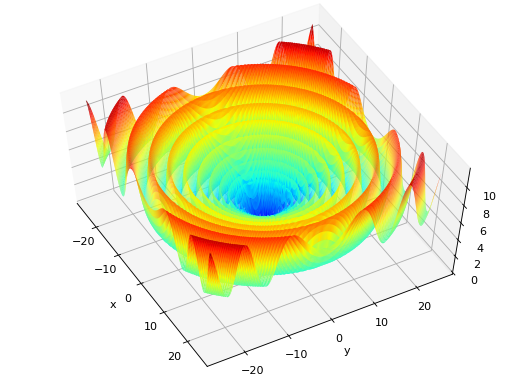
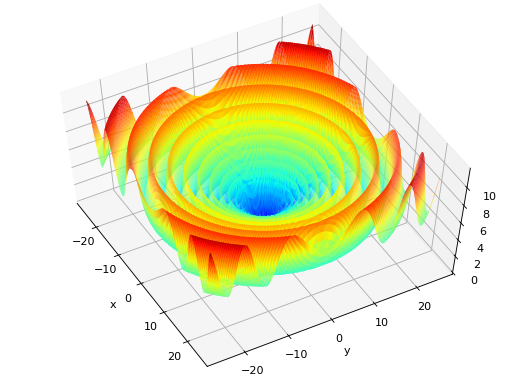
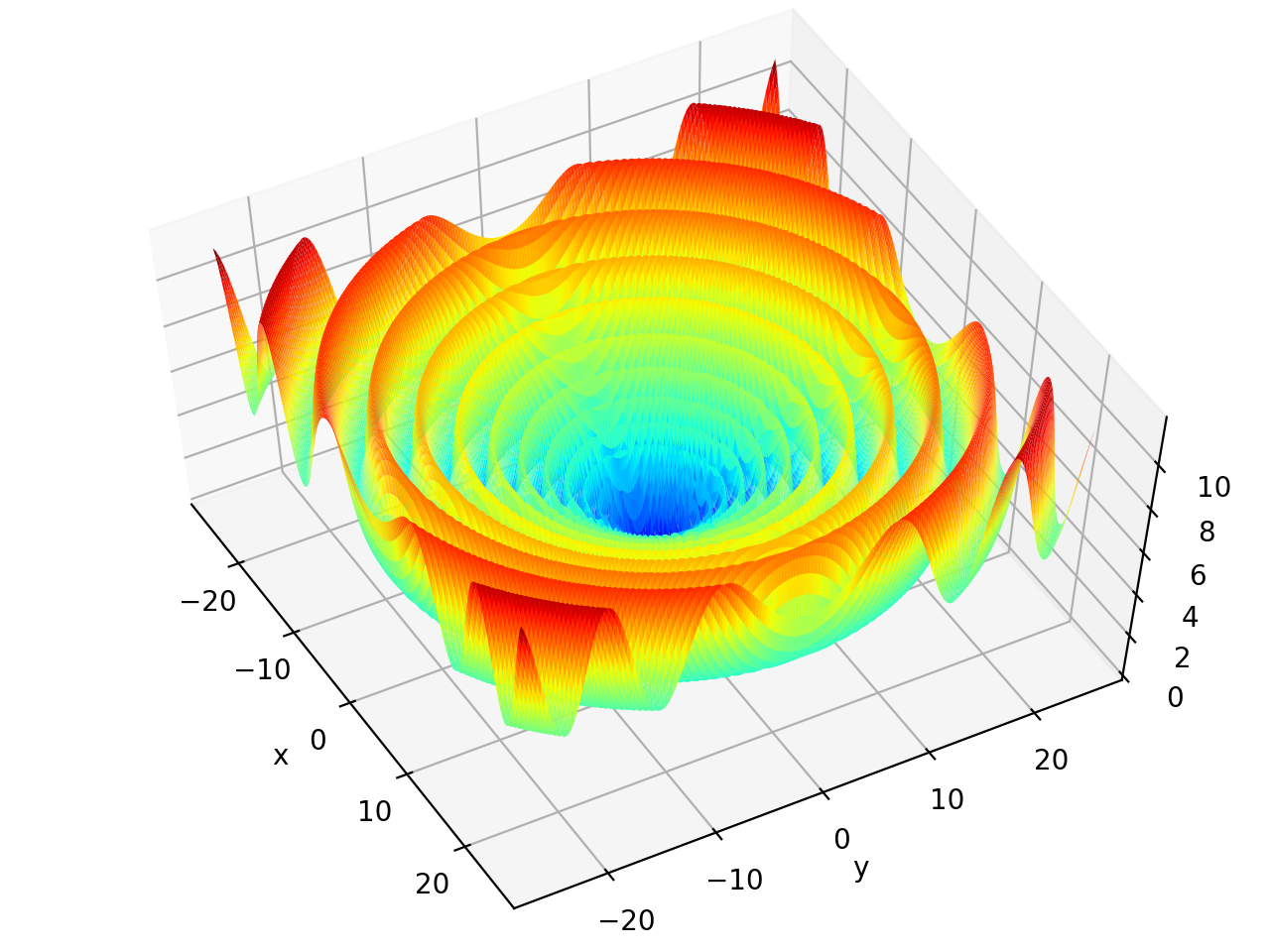
surrogate.benchmarks.griewank(variable)[source]¶ Griewank test objective function.
Type minimization Range \(x_i \in [-600, 600]\) Global optima \(x_i = 0, \forall i \in \lbrace 1 \ldots N\rbrace\), \(f(\mathbf{x}) = 0\) Function \(f(\mathbf{x}) = \frac{1}{4000}\sum_{i=1}^N\,x_i^2 - \prod_{i=1}^N\cos\left(\frac{x_i}{\sqrt{i}}\right) + 1\) (Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
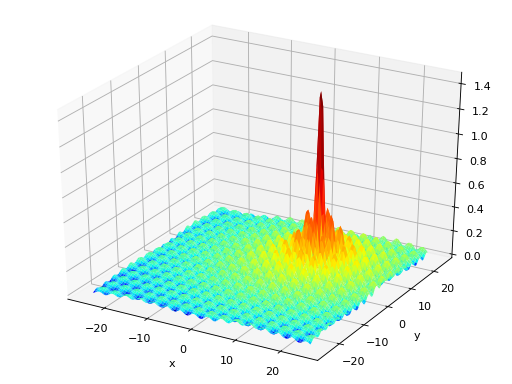
surrogate.benchmarks.h1(variable)[source]¶ Simple two-dimensional function containing several local maxima. From: The Merits of a Parallel Genetic Algorithm in Solving Hard Optimization Problems, A. J. Knoek van Soest and L. J. R. Richard Casius, J. Biomech. Eng. 125, 141 (2003)
Type maximization Range \(x_i \in [-100, 100]\) Global optima \(\mathbf{x} = (8.6998, 6.7665)\), \(f(\mathbf{x}) = 2\) Function \(f(\mathbf{x}) = \frac{\sin(x_1 - \frac{x_2}{8})^2 + \sin(x_2 + \frac{x_1}{8})^2}{\sqrt{(x_1 - 8.6998)^2 + (x_2 - 6.7665)^2} + 1}\) (Source code, png, hires.png, pdf)

{kind=link}
{kind=link}
-
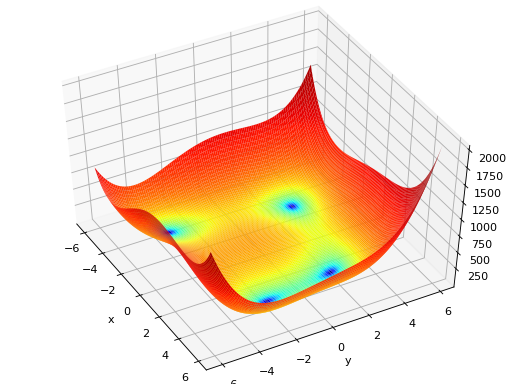
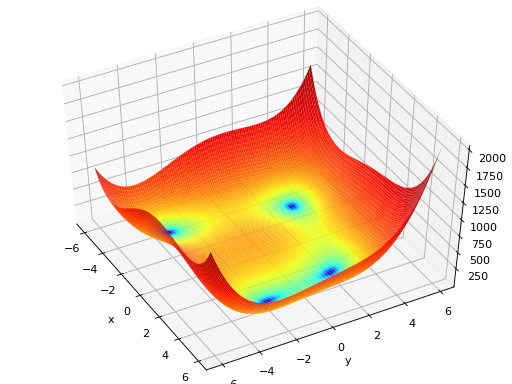
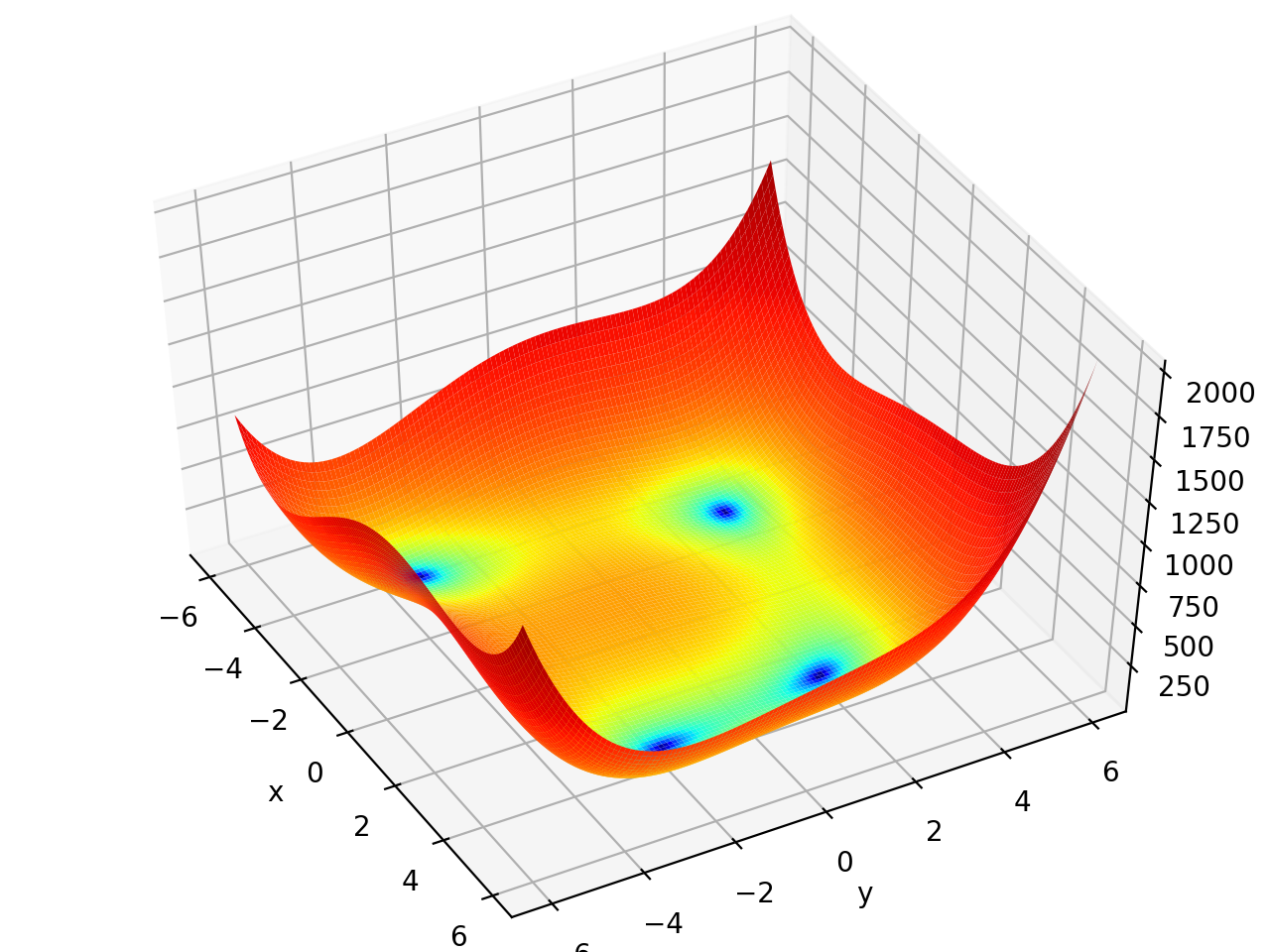
surrogate.benchmarks.himmelblau(variable)[source]¶ The Himmelblau’s function is multimodal with 4 defined minimums in \([-6, 6]^2\).
Type minimization Range \(x_i \in [-6, 6]\) Global optima \(\mathbf{x}_1 = (3.0, 2.0)\), \(f(\mathbf{x}_1) = 0\)
\(\mathbf{x}_2 = (-2.805118, 3.131312)\), \(f(\mathbf{x}_2) = 0\)
\(\mathbf{x}_3 = (-3.779310, -3.283186)\), \(f(\mathbf{x}_3) = 0\)
\(\mathbf{x}_4 = (3.584428, -1.848126)\), \(f(\mathbf{x}_4) = 0\)
Function \(f(x_1, x_2) = (x_1^2 + x_2 - 11)^2 + (x_1 + x_2^2 -7)^2\) (Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
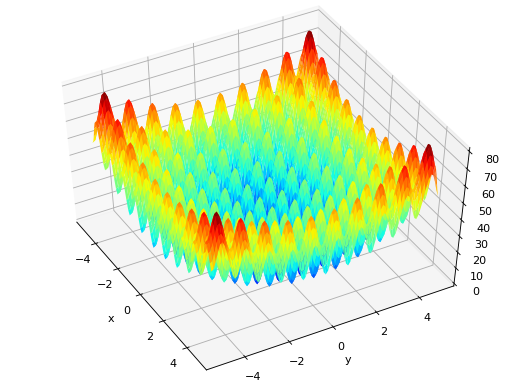
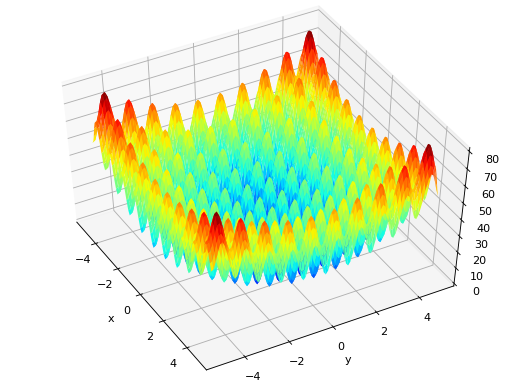
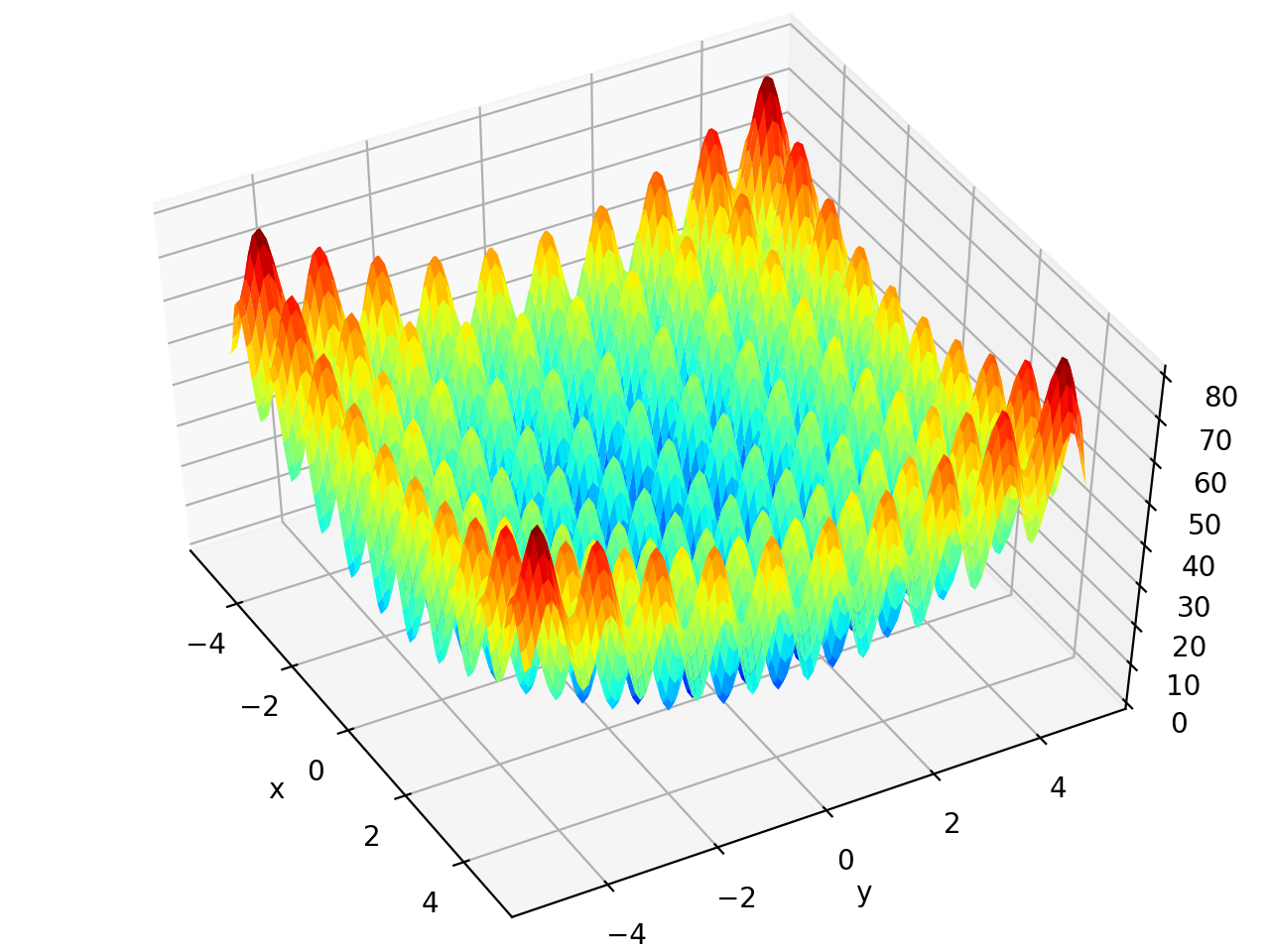
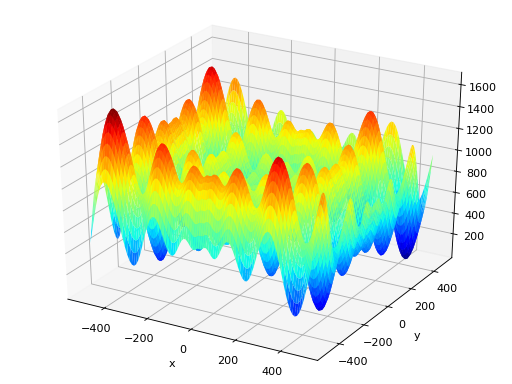
surrogate.benchmarks.rastrigin(variable)[source]¶ Rastrigin test objective function.
Type minimization Range \(x_i \in [-5.12, 5.12]\) Global optima \(x_i = 0, \forall i \in \lbrace 1 \ldots N\rbrace\), \(f(\mathbf{x}) = 0\) Function \(f(\mathbf{x}) = 10N \sum_{i=1}^N x_i^2 - 10 \cos(2\pi x_i)\) (Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
surrogate.benchmarks.rastrigin_scaled(variable)[source]¶ Scaled Rastrigin test objective function.
\(f_{\text{RastScaled}}(\mathbf{x}) = 10N + \sum_{i=1}^N \left(10^{\left(\frac{i-1}{N-1}\right)} x_i \right)^2 x_i)^2 - 10\cos\left(2\pi 10^{\left(\frac{i-1}{N-1}\right)} x_i \right)\)
-
surrogate.benchmarks.rastrigin_skew(variable)[source]¶ Skewed Rastrigin test objective function.
\(f_{\text{RastSkew}}(\mathbf{x}) = 10N \sum_{i=1}^N \left(y_i^2 - 10 \cos(2\pi x_i)\right)\)
\(\text{with } y_i = \begin{cases} 10\cdot x_i & \text{ if } x_i > 0,\\ x_i & \text{ otherwise } \end{cases}\)
-
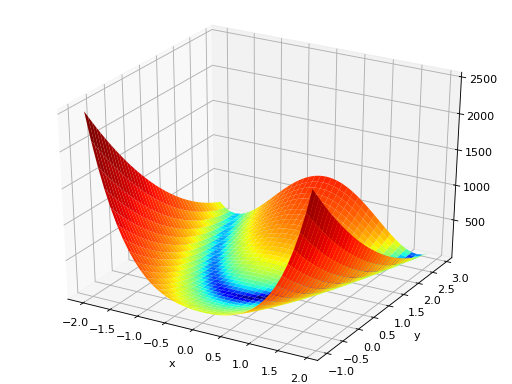
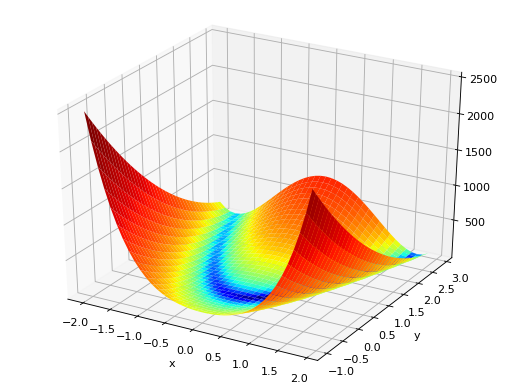
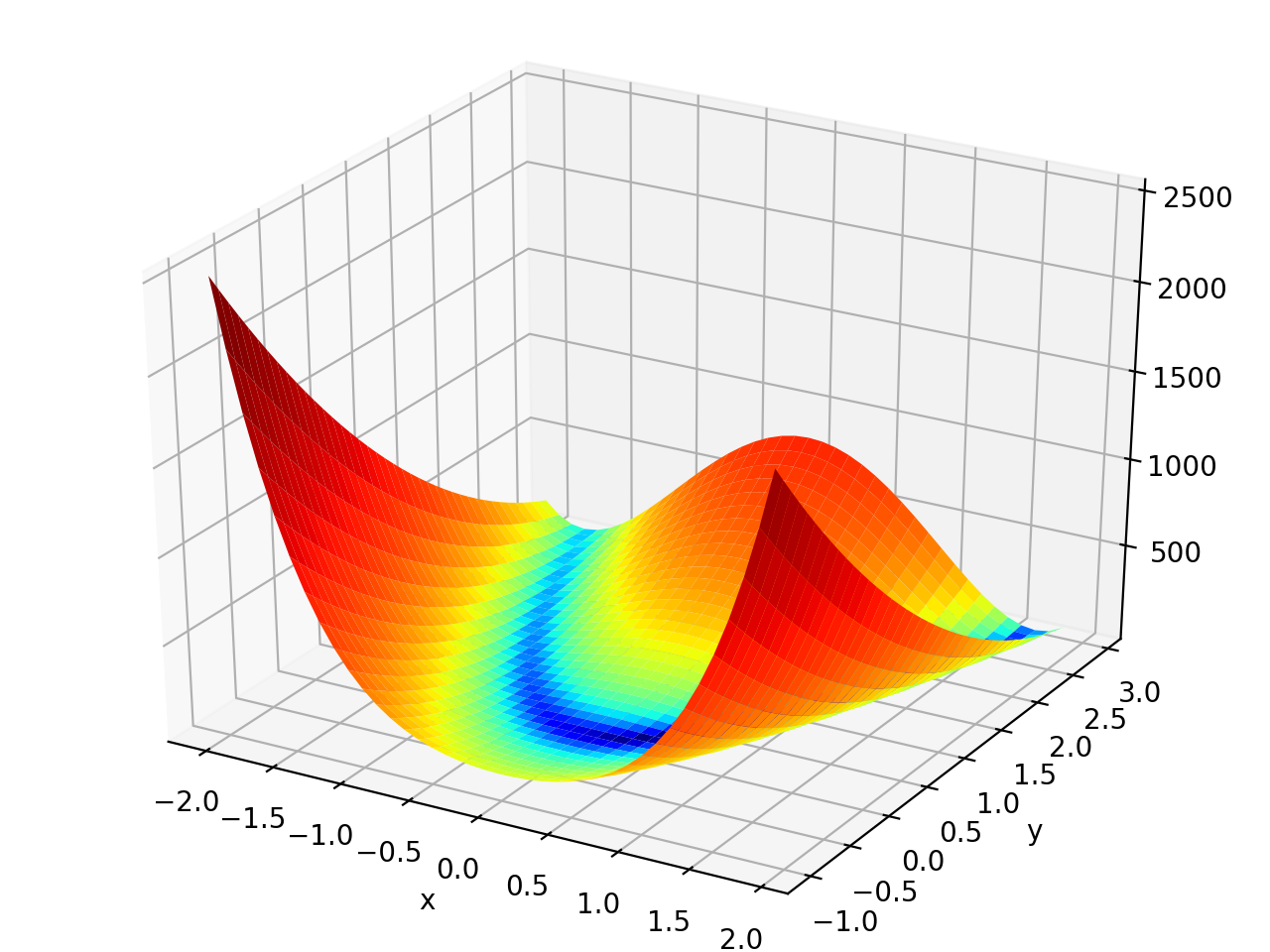
surrogate.benchmarks.rosenbrock(variable)[source]¶ Rosenbrock test objective function.
Type minimization Range none Global optima \(x_i = 1, \forall i \in \lbrace 1 \ldots N\rbrace\), \(f(\mathbf{x}) = 0\) Function \(f(\mathbf{x}) = \sum_{i=1}^{N-1} (1-x_i)^2 + 100 (x_{i+1} - x_i^2 )^2\) (Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
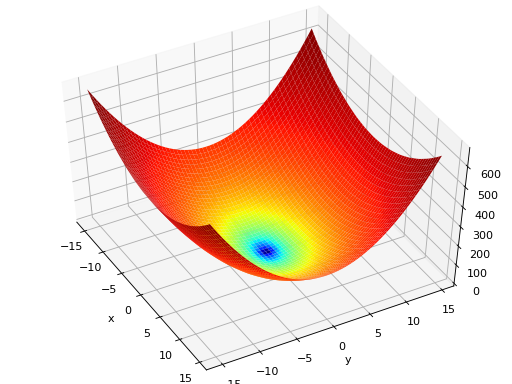
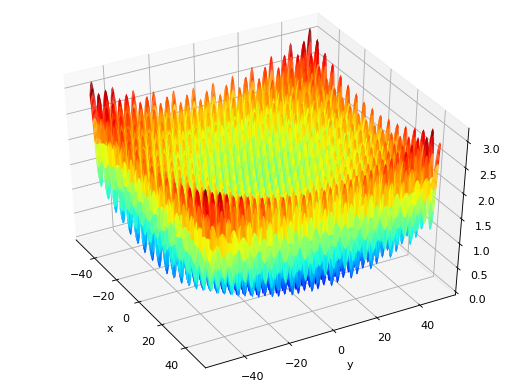
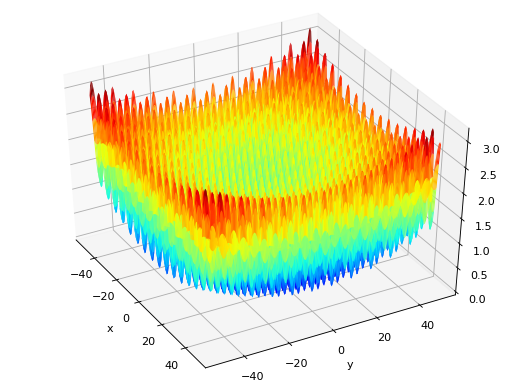
surrogate.benchmarks.schaffer(variable)[source]¶ Schaffer test objective function.
Type minimization Range \(x_i \in [-100, 100]\) Global optima \(x_i = 0, \forall i \in \lbrace 1 \ldots N\rbrace\), \(f(\mathbf{x}) = 0\) Function \(f(\mathbf{x}) = \sum_{i=1}^{N-1} (x_i^2+x_{i+1}^2)^{0.25} \cdot \left[ \sin^2(50\cdot(x_i^2+x_{i+1}^2)^{0.10}) + 1.0 \right]\) (Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
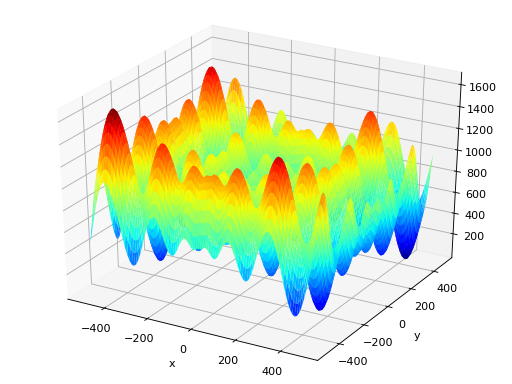
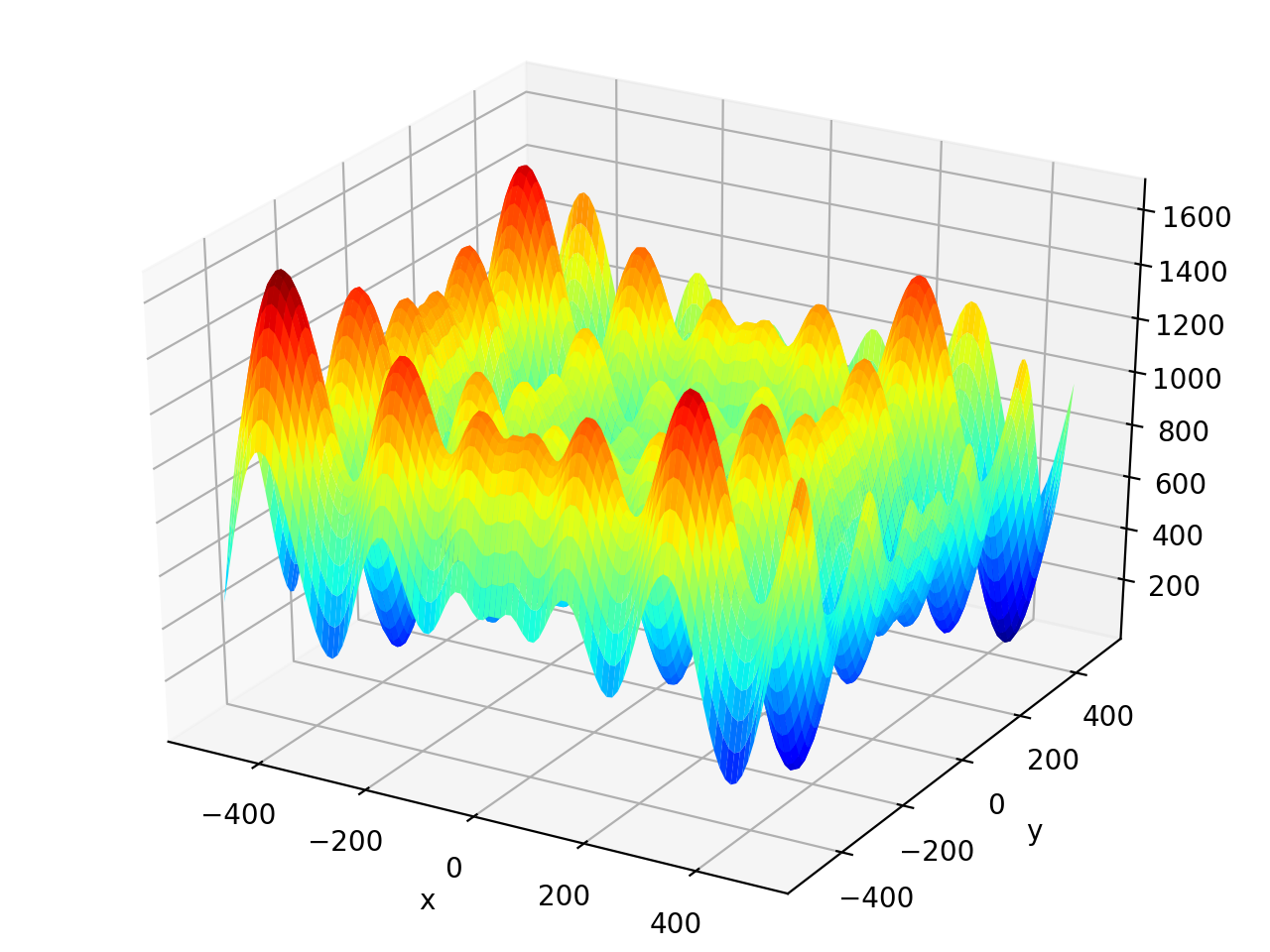
surrogate.benchmarks.schwefel(variable)[source]¶ Schwefel test objective function.
Type minimization Range \(x_i \in [-500, 500]\) Global optima \(x_i = 420.96874636, \forall i \in \lbrace 1 \ldots N\rbrace\), \(f(\mathbf{x}) = 0\) Function \(f(\mathbf{x}) = 418.9828872724339\cdot N - \sum_{i=1}^N\,x_i\sin\left(\sqrt{|x_i|}\right)\) (Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
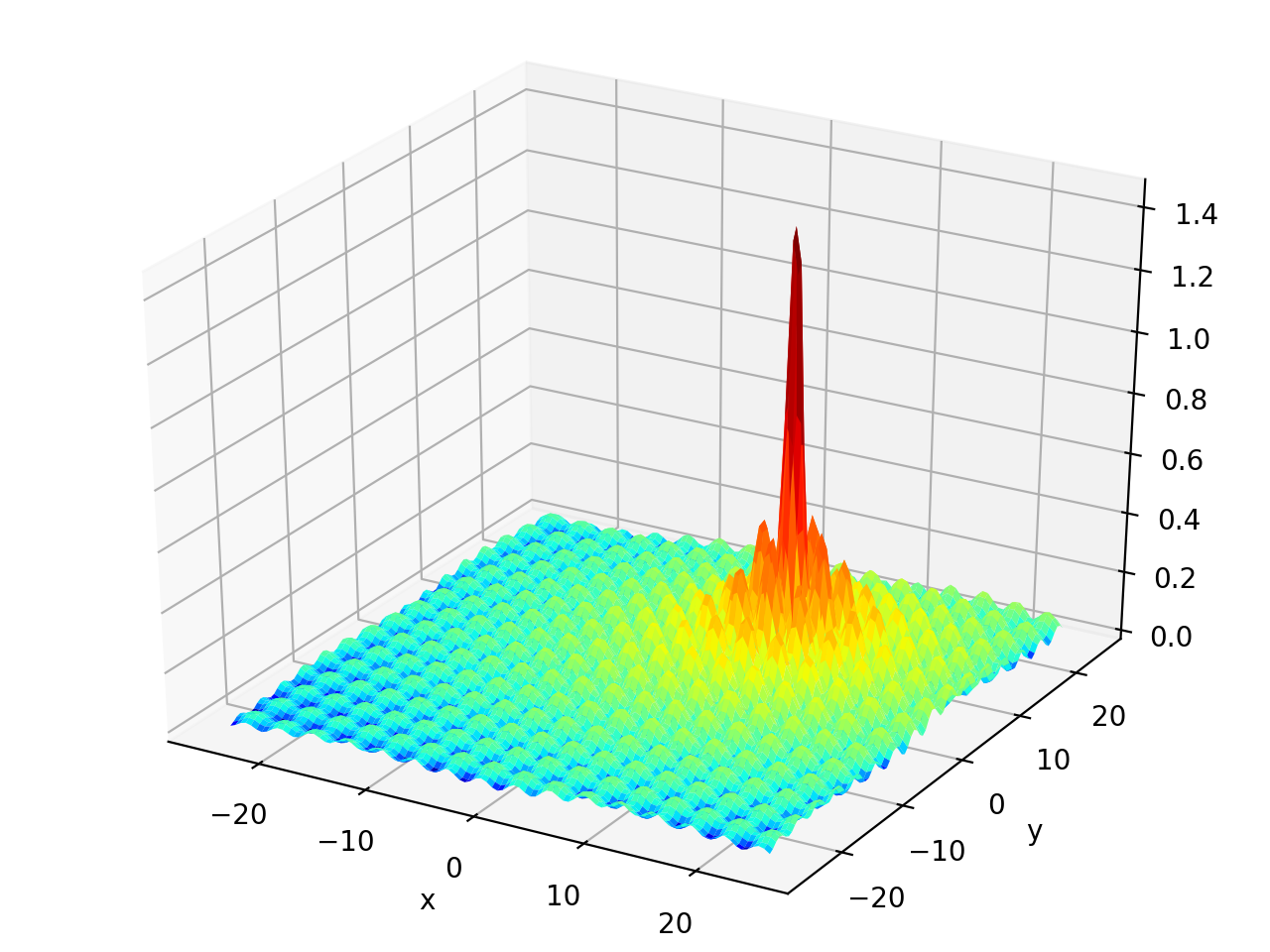
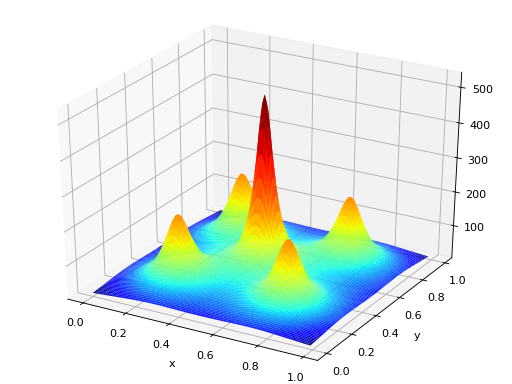
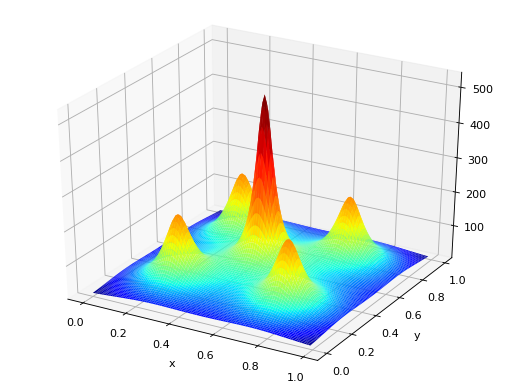
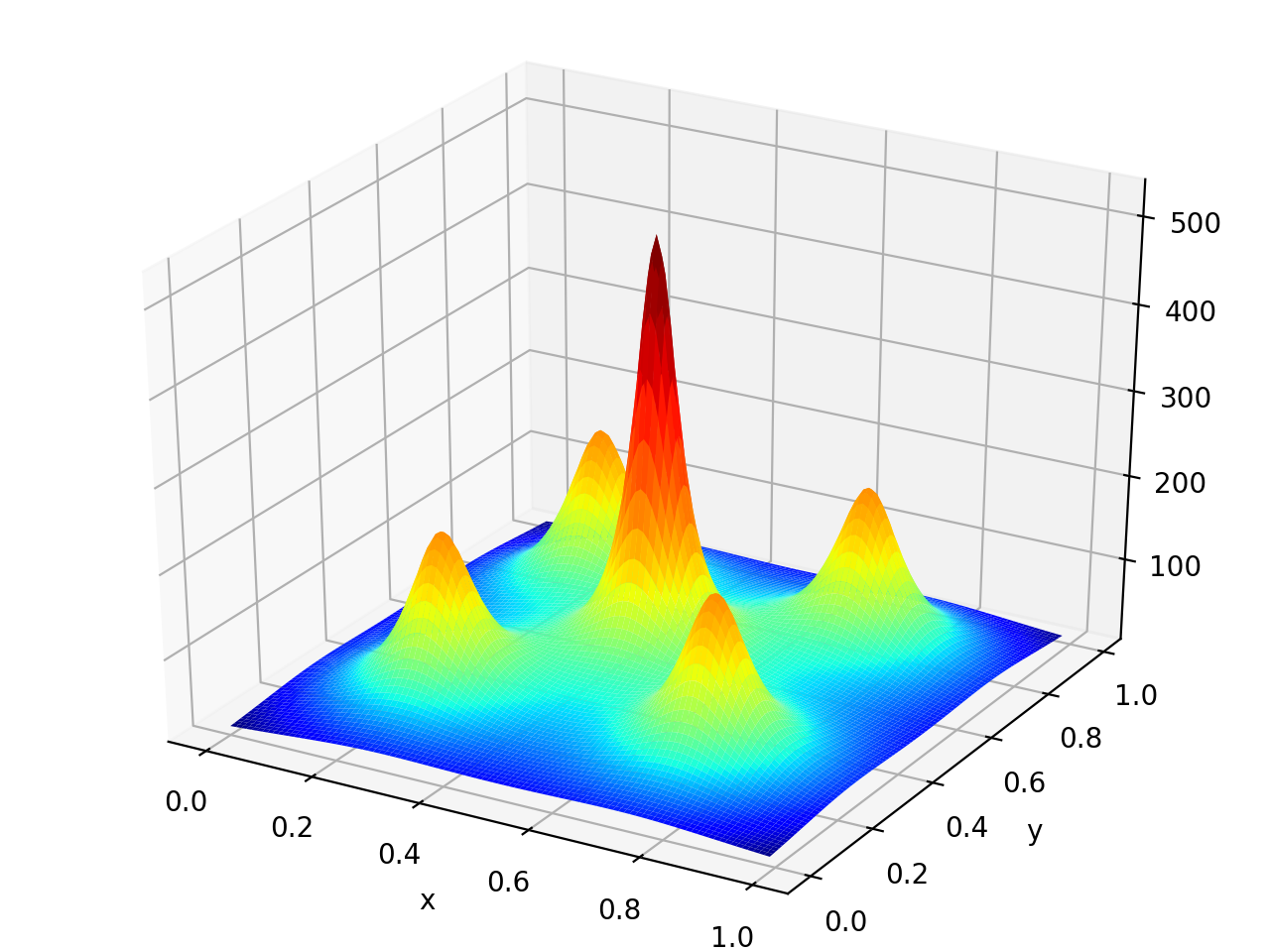
surrogate.benchmarks.shekel(variable, a, c)[source]¶ The Shekel multimodal function can have any number of maxima. The number of maxima is given by the length of any of the arguments a or c, a is a matrix of size \(M\times N\), where M is the number of maxima and N the number of dimensions and c is a \(M\times 1\) vector. The matrix \(\mathcal{A}\) can be seen as the position of the maxima and the vector \(\mathbf{c}\), the width of the maxima.
\(f_\text{Shekel}(\mathbf{x}) = \sum_{i = 1}^{M} \frac{1}{c_{i} + \sum_{j = 1}^{N} (x_{j} - a_{ij})^2 }\)
The following figure uses
\(\mathcal{A} = \begin{bmatrix} 0.5 & 0.5 \\ 0.25 & 0.25 \\ 0.25 & 0.75 \\ 0.75 & 0.25 \\ 0.75 & 0.75 \end{bmatrix}\) and \(\mathbf{c} = \begin{bmatrix} 0.002 \\ 0.005 \\ 0.005 \\ 0.005 \\ 0.005 \end{bmatrix}\), thus defining 5 maximums in \(\mathbb{R}^2\).
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
2.2. Multi-objective¶
-
surrogate.benchmarks.fonseca(variable)[source]¶ Fonseca and Fleming’s multiobjective function. From: C. M. Fonseca and P. J. Fleming, “Multiobjective optimization and multiple constraint handling with evolutionary algorithms – Part II: Application example”, IEEE Transactions on Systems, Man and Cybernetics, 1998.
\(f_{\text{Fonseca}1}(\mathbf{x}) = 1 - e^{-\sum_{i=1}^{3}(x_i - \frac{1}{\sqrt{3}})^2}\)
\(f_{\text{Fonseca}2}(\mathbf{x}) = 1 - e^{-\sum_{i=1}^{3}(x_i + \frac{1}{\sqrt{3}})^2}\)
-
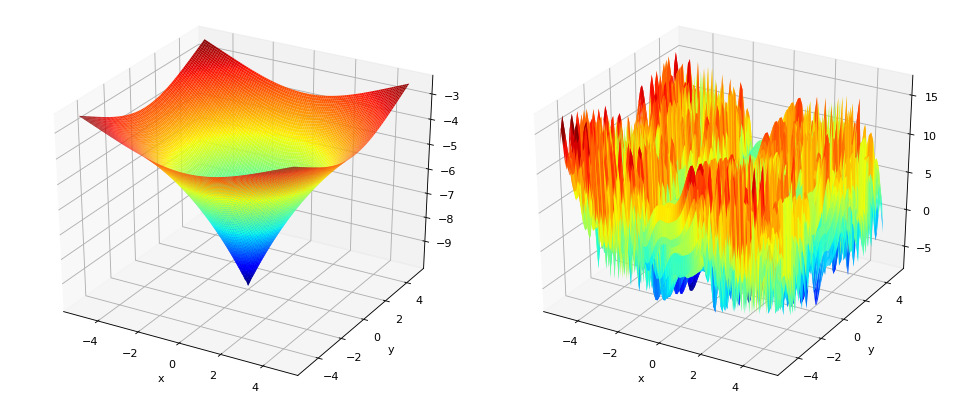
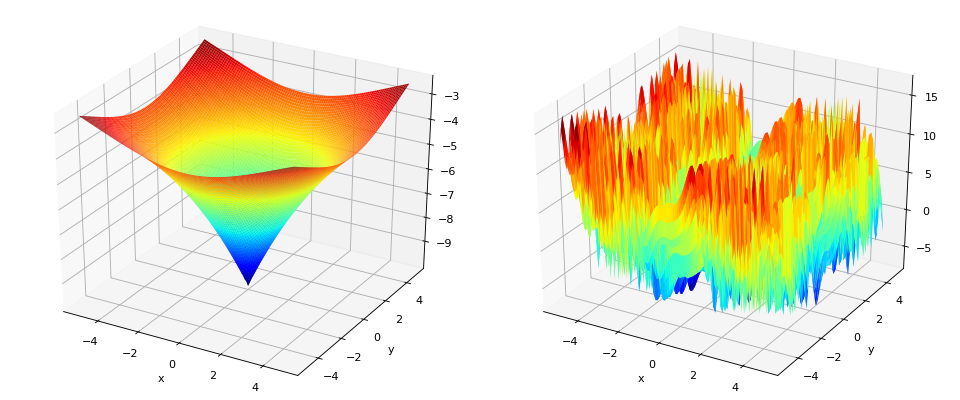
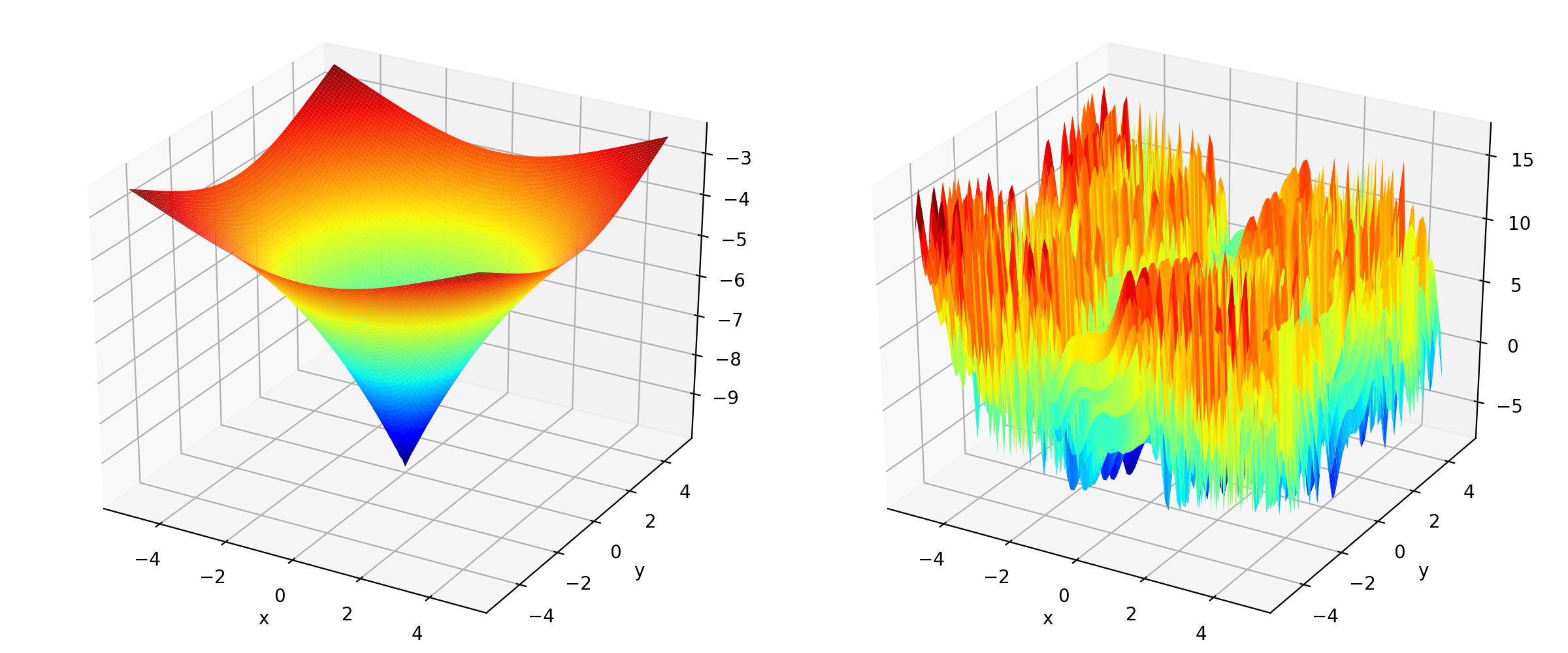
surrogate.benchmarks.kursawe(variable)[source]¶ Kursawe multiobjective function.
\(f_{\text{Kursawe}1}(\mathbf{x}) = \sum_{i=1}^{N-1} -10 e^{-0.2 \sqrt{x_i^2 + x_{i+1}^2} }\)
\(f_{\text{Kursawe}2}(\mathbf{x}) = \sum_{i=1}^{N} |x_i|^{0.8} + 5 \sin(x_i^3)\)
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
surrogate.benchmarks.schaffer_mo(variable)[source]¶ Schaffer’s multiobjective function on a one attribute variable. From: J. D. Schaffer, “Multiple objective optimization with vector evaluated genetic algorithms”, in Proceedings of the First International Conference on Genetic Algorithms, 1987.
\(f_{\text{Schaffer}1}(\mathbf{x}) = x_1^2\)
\(f_{\text{Schaffer}2}(\mathbf{x}) = (x_1-2)^2\)
-
surrogate.benchmarks.dtlz1(variable, obj)[source]¶ DTLZ1 mutliobjective function. It returns a tuple of obj values. The variable must have at least obj elements. From: K. Deb, L. Thiele, M. Laumanns and E. Zitzler. Scalable Multi-Objective Optimization Test Problems. CEC 2002, p. 825 - 830, IEEE Press, 2002.
\(g(\mathbf{x}_m) = 100\left(|\mathbf{x}_m| + \sum_{x_i \in \mathbf{x}_m}\left((x_i - 0.5)^2 - \cos(20\pi(x_i - 0.5))\right)\right)\)
\(f_{\text{DTLZ1}1}(\mathbf{x}) = \frac{1}{2} (1 + g(\mathbf{x}_m)) \prod_{i=1}^{m-1}x_i\)
\(f_{\text{DTLZ1}2}(\mathbf{x}) = \frac{1}{2} (1 + g(\mathbf{x}_m)) (1-x_{m-1}) \prod_{i=1}^{m-2}x_i\)
\(\ldots\)
\(f_{\text{DTLZ1}m-1}(\mathbf{x}) = \frac{1}{2} (1 + g(\mathbf{x}_m)) (1 - x_2) x_1\)
\(f_{\text{DTLZ1}m}(\mathbf{x}) = \frac{1}{2} (1 - x_1)(1 + g(\mathbf{x}_m))\)
Where \(m\) is the number of objectives and \(\mathbf{x}_m\) is a vector of the remaining attributes \([x_m~\ldots~x_n]\) of the variable in \(n > m\) dimensions.
-
surrogate.benchmarks.dtlz2(variable, obj)[source]¶ DTLZ2 mutliobjective function. It returns a tuple of obj values. The variable must have at least obj elements. From: K. Deb, L. Thiele, M. Laumanns and E. Zitzler. Scalable Multi-Objective Optimization Test Problems. CEC 2002, p. 825 - 830, IEEE Press, 2002.
\(g(\mathbf{x}_m) = \sum_{x_i \in \mathbf{x}_m} (x_i - 0.5)^2\)
\(f_{\text{DTLZ2}1}(\mathbf{x}) = (1 + g(\mathbf{x}_m)) \prod_{i=1}^{m-1} \cos(0.5x_i\pi)\)
\(f_{\text{DTLZ2}2}(\mathbf{x}) = (1 + g(\mathbf{x}_m)) \sin(0.5x_{m-1}\pi ) \prod_{i=1}^{m-2} \cos(0.5x_i\pi)\)
\(\ldots\)
\(f_{\text{DTLZ2}m}(\mathbf{x}) = (1 + g(\mathbf{x}_m)) \sin(0.5x_{1}\pi )\)
Where \(m\) is the number of objectives and \(\mathbf{x}_m\) is a vector of the remaining attributes \([x_m~\ldots~x_n]\) of the variable in \(n > m\) dimensions.
-
surrogate.benchmarks.dtlz3(variable, obj)[source]¶ DTLZ3 mutliobjective function. It returns a tuple of obj values. The variable must have at least obj elements. From: K. Deb, L. Thiele, M. Laumanns and E. Zitzler. Scalable Multi-Objective Optimization Test Problems. CEC 2002, p. 825 - 830, IEEE Press, 2002.
\(g(\mathbf{x}_m) = 100\left(|\mathbf{x}_m| + \sum_{x_i \in \mathbf{x}_m}\left((x_i - 0.5)^2 - \cos(20\pi(x_i - 0.5))\right)\right)\)
\(f_{\text{DTLZ3}1}(\mathbf{x}) = (1 + g(\mathbf{x}_m)) \prod_{i=1}^{m-1} \cos(0.5x_i\pi)\)
\(f_{\text{DTLZ3}2}(\mathbf{x}) = (1 + g(\mathbf{x}_m)) \sin(0.5x_{m-1}\pi ) \prod_{i=1}^{m-2} \cos(0.5x_i\pi)\)
\(\ldots\)
\(f_{\text{DTLZ3}m}(\mathbf{x}) = (1 + g(\mathbf{x}_m)) \sin(0.5x_{1}\pi )\)
Where \(m\) is the number of objectives and \(\mathbf{x}_m\) is a vector of the remaining attributes \([x_m~\ldots~x_n]\) of the variable in \(n > m\) dimensions.
-
surrogate.benchmarks.dtlz4(variable, obj, alpha)[source]¶ DTLZ4 mutliobjective function. It returns a tuple of obj values. The variable must have at least obj elements. The alpha parameter allows for a meta-variable mapping in
dtlz2()\(x_i \rightarrow x_i^\alpha\), the authors suggest \(\alpha = 100\). From: K. Deb, L. Thiele, M. Laumanns and E. Zitzler. Scalable Multi-Objective Optimization Test Problems. CEC 2002, p. 825 - 830, IEEE Press, 2002.\(g(\mathbf{x}_m) = \sum_{x_i \in \mathbf{x}_m} (x_i - 0.5)^2\)
\(f_{\text{DTLZ4}1}(\mathbf{x}) = (1 + g(\mathbf{x}_m)) \prod_{i=1}^{m-1} \cos(0.5x_i^\alpha\pi)\)
\(f_{\text{DTLZ4}2}(\mathbf{x}) = (1 + g(\mathbf{x}_m)) \sin(0.5x_{m-1}^\alpha\pi ) \prod_{i=1}^{m-2} \cos(0.5x_i^\alpha\pi)\)
\(\ldots\)
\(f_{\text{DTLZ4}m}(\mathbf{x}) = (1 + g(\mathbf{x}_m)) \sin(0.5x_{1}^\alpha\pi )\)
Where \(m\) is the number of objectives and \(\mathbf{x}_m\) is a vector of the remaining attributes \([x_m~\ldots~x_n]\) of the variable in \(n > m\) dimensions.
-
surrogate.benchmarks.zdt1(variable)[source]¶ ZDT1 multiobjective function.
\(g(\mathbf{x}) = 1 + \frac{9}{n-1}\sum_{i=2}^n x_i\)
\(f_{\text{ZDT1}1}(\mathbf{x}) = x_1\)
\(f_{\text{ZDT1}2}(\mathbf{x}) = g(\mathbf{x})\left[1 - \sqrt{\frac{x_1}{g(\mathbf{x})}}\right]\)
-
surrogate.benchmarks.zdt2(variable)[source]¶ ZDT2 multiobjective function.
\(g(\mathbf{x}) = 1 + \frac{9}{n-1}\sum_{i=2}^n x_i\)
\(f_{\text{ZDT2}1}(\mathbf{x}) = x_1\)
\(f_{\text{ZDT2}2}(\mathbf{x}) = g(\mathbf{x})\left[1 - \left(\frac{x_1}{g(\mathbf{x})}\right)^2\right]\)
-
surrogate.benchmarks.zdt3(variable)[source]¶ ZDT3 multiobjective function.
\(g(\mathbf{x}) = 1 + \frac{9}{n-1}\sum_{i=2}^n x_i\)
\(f_{\text{ZDT3}1}(\mathbf{x}) = x_1\)
\(f_{\text{ZDT3}2}(\mathbf{x}) = g(\mathbf{x})\left[1 - \sqrt{\frac{x_1}{g(\mathbf{x})}} - \frac{x_1}{g(\mathbf{x})}\sin(10\pi x_1)\right]\)
-
surrogate.benchmarks.zdt4(variable)[source]¶ ZDT4 multiobjective function.
\(g(\mathbf{x}) = 1 + 10(n-1) + \sum_{i=2}^n \left[ x_i^2 - 10\cos(4\pi x_i) \right]\)
\(f_{\text{ZDT4}1}(\mathbf{x}) = x_1\)
\(f_{\text{ZDT4}2}(\mathbf{x}) = g(\mathbf{x})\left[ 1 - \sqrt{x_1/g(\mathbf{x})} \right]\)
-
surrogate.benchmarks.zdt6(variable)[source]¶ ZDT6 multiobjective function.
\(g(\mathbf{x}) = 1 + 9 \left[ \left(\sum_{i=2}^n x_i\right)/(n-1) \right]^{0.25}\)
\(f_{\text{ZDT6}1}(\mathbf{x}) = 1 - \exp(-4x_1)\sin^6(6\pi x_1)\)
\(f_{\text{ZDT6}2}(\mathbf{x}) = g(\mathbf{x}) \left[ 1 - (f_{\text{ZDT6}1}(\mathbf{x})/g(\mathbf{x}))^2 \right]\)